自动驾驶夜间环境感知:红外摄像头与激光雷达协作提升识别距离40%
在自动驾驶技术的不断发展中,夜间环境的感知仍是一个巨大的挑战。夜间驾驶由于光线不足、视野受限等因素,往往增加了安全隐患。为了解决这一问题,越来越多的自动驾驶系统开始采用红外摄像头与激光雷达的组合,这种技术能够有效提升夜间环境的感知能力。根据最新研究,红外摄像头和激光雷达的结合能够将夜间环境识别的距离提升40%。本文将详细介绍这一技术的工作原理、优势、应用以及未来的发展趋势。

1. 夜间驾驶面临的挑战
夜间驾驶的主要问题之一是视觉系统受限。传统的摄像头在低光环境下的表现不佳,甚至无法有效识别远处的障碍物或行人。此外,自动驾驶系统依赖的传感器,如雷达,虽然在低光环境下有一定优势,但其精度和分辨率远不及白天。因此,如何在夜间依然保持高效的感知能力,是自动驾驶技术发展的关键。
2. 红外摄像头的工作原理与优势
红外摄像头利用热成像技术,通过捕捉物体发出的红外辐射来生成图像。相比于传统摄像头依赖可见光,红外摄像头能够在完全黑暗的环境中工作,甚至能够识别远距离的物体。这使得红外摄像头成为夜间环境感知的重要工具。
红外摄像头的主要优势包括:
- 全时工作能力:不依赖外部光源,能够在任何低光或黑暗的环境中工作。
- 高灵敏度:红外摄像头能够捕捉到温度差异,即使是远处的行人或动物,也能通过体温发出的红外辐射清晰呈现。
- 优异的物体识别能力:即使在雨雪天气、雾霾或其他恶劣环境下,红外摄像头也能有效识别目标物体。
3. 激光雷达的工作原理与优势
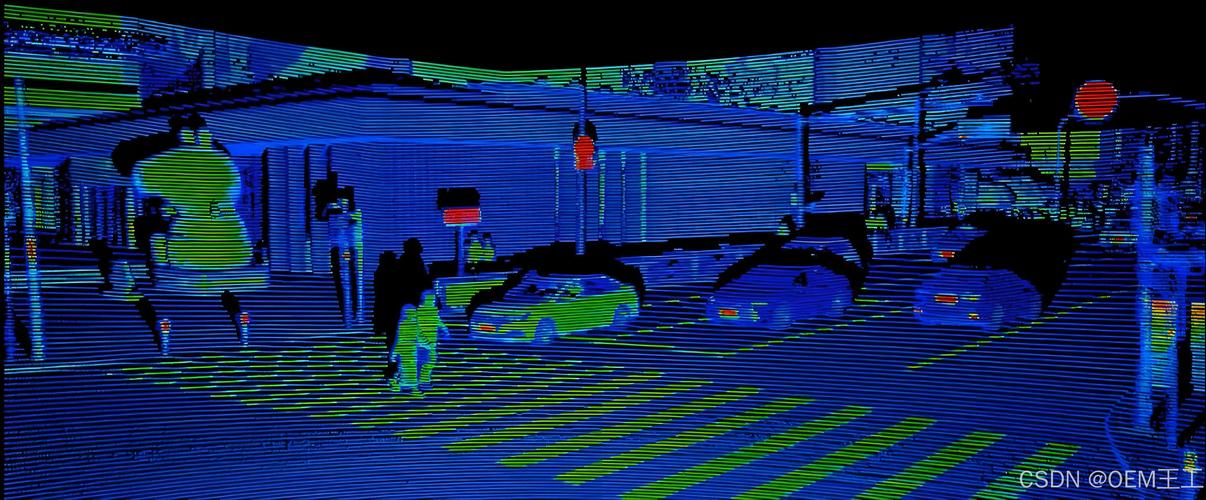
激光雷达(LiDAR)是一种通过激光束测量物体距离的传感器,它通过发射激光并接收反射回来的信号来计算距离。激光雷达的精度非常高,能够生成高分辨率的三维地图,这对于自动驾驶系统在复杂环境中精确定位和避障至关重要。
激光雷达的优势主要体现在:
- 高精度的距离测量:激光雷达能提供毫米级的精度,非常适合于复杂的环境感知。
- 强大的三维建图能力:激光雷达能够在三维空间中精确构建周围环境的模型,提供更全面的信息。
- 不受光照影响:激光雷达的工作原理不依赖外部光线,因此在夜间或极端天气条件下也能保持稳定的性能。
4. 红外摄像头与激光雷达的协同作用
红外摄像头与激光雷达的结合,可以发挥各自的优势,互为补充,极大地提升夜间驾驶的感知效果。在夜间驾驶时,红外摄像头能够提供清晰的热成像图,帮助识别温度较高的物体,如行人、动物或其他障碍物。而激光雷达则提供精确的三维空间信息,帮助自动驾驶系统确定物体的准确位置和形态。
通过红外摄像头和激光雷达的联合感知,自动驾驶系统不仅能够在夜间更远距离地识别障碍物,还能提高系统的准确性和安全性。据研究,红外摄像头与激光雷达的结合使得自动驾驶系统的夜间识别距离提高了40%,显著增强了车辆在低光环境中的行驶能力。
5. 技术的实际应用
目前,红外摄像头与激光雷达的联合应用已经在一些自动驾驶平台中得到了实际部署。例如,特斯拉、Waymo等自动驾驶技术公司,均在其车辆中集成了这些传感器,用于提升车辆在复杂环境中的驾驶安全性。此外,这项技术也开始在商用车辆、无人配送车和自动泊车系统中得到广泛应用。
这种组合技术特别适用于恶劣天气条件下的自动驾驶,例如雾霾、雨雪或黑夜等,这些条件会大幅度降低传统视觉传感器的性能,而红外摄像头和激光雷达的结合能有效克服这些限制。
6. 持续发展与未来前景
随着自动驾驶技术的不断进步,红外摄像头与激光雷达的协同作用将变得越来越重要。未来,传感器融合的技术将更加精密,自动驾驶系统将能够在更多的环境条件下实现安全、精准的驾驶。
此外,随着人工智能算法的发展,传感器之间的数据融合和处理能力将不断提升。这将进一步提升自动驾驶系统的响应速度和判断能力,从而为人类的出行提供更加安全、可靠的保障。
7. 结论
红外摄像头与激光雷达的结合,为自动驾驶的夜间环境感知提供了强有力的支持。通过这两种先进的传感器技术,自动驾驶系统在低光环境下的感知能力得到了显著提升,尤其是在识别距离方面,提升幅度可达到40%。随着技术的不断发展,红外摄像头与激光雷达将进一步推动自动驾驶技术的成熟,使其能够在更多复杂环境下安全运行。